Femto Bolt Sensor sync
For information on synchronizing the Azure Kinect for use with Depthkit Studio, see theAzure Kinect DK Sensor sync page.
It's necessary to synchronize all of your Femto Bolt sensors to each other to ensure that the data from each sensor aligns. This is accomplished by connecting all of the sensors with sync cables.
In this page
Star-Configuration with Orbbec Sync Hub Pro →\
External sync →\
Troubleshooting →\
Next steps →\
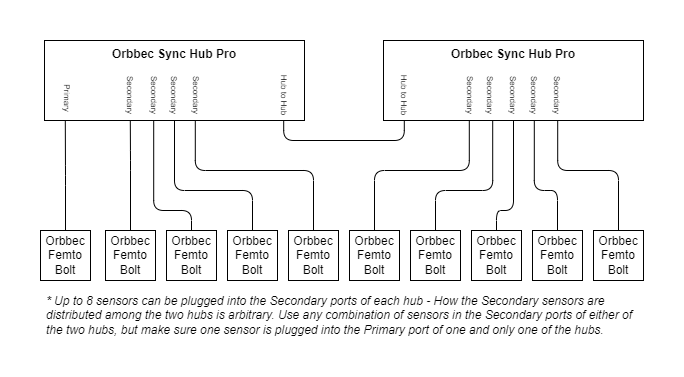
Star-Configuration with Orbbec Sync Hub Pro
This configuration uses one of your sensors as the generator, which provides a sync reference signal to each of the other sensors via the Orbbec Sync Hub Pro.

You'll need
- One Orbbec Sync Hub Pro (power supply & cable not included), USB power supply, and USB Type-C power cable for up to 9 sensors.
- One additional hub and accessories, for a total of two hubs with power supplies, and power cables is necessary for 10 sensors.
- As many Orbbec Sync Adapters as sensors.
-
As many 30ft CAT-5e cable as sensors to connect each sensor to the sync hub.\ If using 10x sensors, one additional Ethernet cable is needed to bridge the two sync hubs together.
-
First, connect a Sync Adapter to the Sync Port on each of your sensors.
- Connect your Sync Hub Pro(s) to power using the USB power supply and USB cable.
- The Femto Bolt supports all 3 logic level voltages, so set the logic level switch to whichever voltage you would like.
- If using 10 sensors with two Sync Hub Pros, connect both hubs' 'Hub to Hub' ports with a CAT-5e cable, and ensure that both hubs are set to the same logic level voltage.
- Select one sensor to be your Primary sensor - The primary role has no effect on other aspects of your configuration, so this can be arbitrarily selected from any of your sensors.
- Connect a CAT-5e cable from the primary sensor's Sync port to the Primary port of Sync Hub Pro.
- Connect all of the other sensors' sync adapters to the Secondary ports of the Sync Hub Pro.
- If using two Sync Hub Pros, the secondary sensors can be connected to any of the hubs' Secondary ports.
Once the hardware is setup, synchronization will occur automatically within Depthkit once streaming starts. Before streaming, the sensors do not report their sync status to Depthkit.
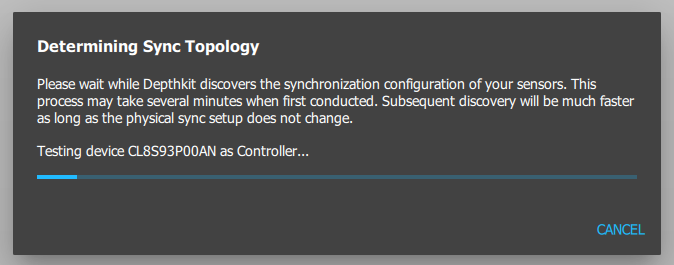
Click 'START STREAMING' to have Depthkit confirm the sync configuration of the sensors automatically. This may take a minute or two the first time you start streaming, as Depthkit needs to try different configurations to discover which sensor is the Primary sensor, but once it is determined, the configuration is saved in the Depthkit project for faster startup of the sensors.
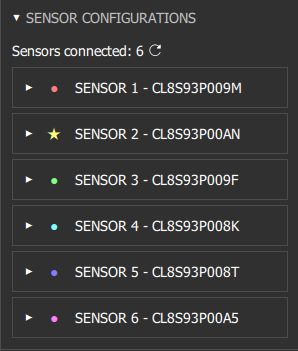
After Depthkit successfully discovers the synchronization configuration of your sensors, the primary sensor will be indicated in the Sensor Configurations panel with a :star: while streaming is active.
External sync
Initial testing has revealed that the Femto Bolt has an internal clock which is 10x more accurate than that of the Azure Kinect, resulting minimal drift between Depthkit captures and other simultaneous recordings like audio.
Because of this, support for locked sync with external devices is not yet supported. If you are interested in prioritizing this functionality, please contact sales@depthkit.tv.
Troubleshooting
If you get an error message saying that unsynchronized sensors were detected, , see the Synchronization Issues page.
Next steps
Once your Femto Bolt sensors are setup to be in sync with one another, proceed to the Calibration guide.